
Geometric Matching in Machine Vision
Core Technology for Intelligent Manufacturing

Introduction
In today’s era of intelligent manufacturing, machine vision technology has become an indispensable component of industrial automation. From precision assembly and inspection of electronic products to quality control in automotive manufacturing, from automatic sorting in food packaging to assisted diagnosis in medical imaging, machine vision technology is profoundly transforming traditional manufacturing. Behind these impressive applications, one core technology consistently plays a crucial role: geometric matching.
Geometric matching technology enables machines to possess human-like “recognition” capabilities, allowing automated equipment to accurately locate target objects in complex and variable industrial environments, achieving high-precision and high-efficiency automated operations. With the development of artificial intelligence and deep learning technologies, geometric matching is evolving toward more intelligent and powerful directions, becoming an important bridge connecting the physical world with the digital world.
1、What is Geometric Matching
1.1 Basic Concepts of Geometric Matching
Geometric matching is a fundamental and critical technology in the field of machine vision. Its core task is to locate and precisely identify specific target objects within images. This process is analogous to how the human visual system recognizes familiar objects in complex scenes. When we search for an acquaintance in a crowded area, our brain automatically extracts and matches geometric features of the face, such as the relative positions of facial features and the contours of the face. Machine vision’s geometric matching technology precisely mimics this cognitive process.
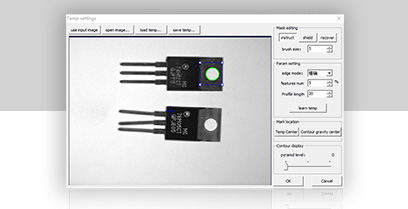
Specifically, geometric matching extracts geometric features such as shapes, edges, and contours of objects to establish a digitized “template.” It then searches for regions in the image to be inspected that match this template and precisely calculates the position, rotation angle, and dimensions of the target object. Unlike matching methods based on color or grayscale, geometric matching focuses on structural features of objects, enabling it to maintain stable recognition performance when facing interference factors such as illumination changes, surface stains, and color variations.
1.2 Differences Between Geometric Matching and Other Matching Techniques
In the field of machine vision, matching techniques are primarily divided into grayscale matching, geometric matching, and contour matching. Understanding the differences among them is crucial for selecting appropriate technical solutions.
Grayscale matching: employs pixel-level grayscale value comparison methods, determining the degree of matching by calculating the normalized grayscale correlation between template and target images. This method’s advantage lies in its simple principles and ease of understanding and implementation, achieving good results in environments with stable lighting conditions and simple backgrounds. However, grayscale matching’s shortcomings are also obvious: it is extremely sensitive to illumination changes, computationally intensive, and has poor robustness, facing significant limitations in practical industrial applications.
Geometric matching: is based on identifying shape features of objects. It extracts geometric structural information of targets, such as edge points, corner points, and line segments, constructing shape descriptors for matching. The greatest advantage of this method lies in its insensitivity to illumination changes and its ability to handle target rotation, scaling, and partial occlusion, demonstrating higher robustness and practicality. Geometric matching is particularly suitable for industrial part positioning, product inspection, and other scenarios requiring high precision and stability.
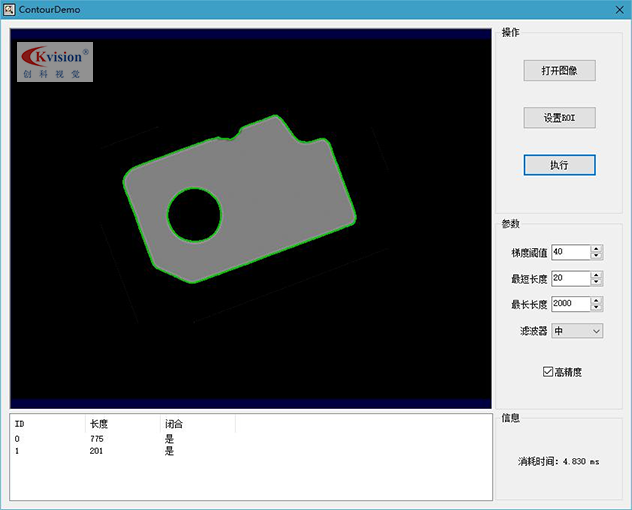
Contour matching: can be viewed as an advanced version of geometric matching. It uses edge contour features of images as templates to search for targets with similar shapes in images. Contour matching not only inherits the advantages of geometric matching but can also handle more complex situations, such as significant target deformation, partial occlusion, and complex backgrounds, possessing higher recognition rates, positioning speeds, and accuracy compared to basic geometric matching.
1.3 Working Principles of Geometric Matching
The implementation process of geometric matching typically includes three core steps, each significantly impacting the final matching accuracy and efficiency.
Step One: Feature Extraction and Template Establishment
This is the foundational stage of geometric matching. The system first extracts geometric features of target objects from template images. These features mainly include:
- Edge points: pixels with dramatic grayscale changes on object contours
- Corner points: locations on object contours with significant curvature changes
- Line segments: straight or curved segments formed by connecting feature points
- Shape descriptors: mathematical parameters describing overall shape characteristics of objects
These geometric features collectively constitute the unique “geometric fingerprint” of an object. Excellent feature extraction algorithms can preserve key shape information while removing redundant data, improving the efficiency of subsequent matching. Modern geometric matching algorithms typically employ pyramid-based layered strategies, extracting features at different resolution levels to ensure both matching speed and positioning accuracy.
Step Two: Feature Matching and Search
At this stage, algorithms search for regions in target images that are similar to template features. This process must consider various geometric transformations that target objects may undergo, including:
- Translation transformation: movement of objects in the image plane
- Rotation transformation: angular rotation of objects around center points
- Scale transformation: enlargement or reduction of object size
- Affine transformation: more complex geometric deformations
To improve search efficiency, modern geometric matching algorithms typically employ coarse-to-fine two-level search strategies. The coarse search stage quickly locates possible matching regions in low-resolution images, while the fine search stage performs precise positioning in high-resolution images. This layered search method greatly reduces computation time, making real-time processing possible.
Step Three: Pose Calculation and Result Output
After finding the best matching position, the system needs to precisely calculate the pose parameters of the target object, including:
- Center coordinates: precise position of the object in the image coordinate system
- Rotation angle: rotational deviation of the object relative to the template
- Size ratio: scaling ratio of the object relative to the template
- Match score: confidence indicator representing matching quality
Modern high-precision applications typically require sub-pixel level positioning accuracy, meaning precision better than one pixel dimension. To achieve this goal, algorithms employ interpolation techniques and iterative optimization methods to further refine calculations based on pixel-level positioning, ultimately outputting pose information accurate to 0.1 pixels or even higher precision.
2、Technical Characteristics of Geometric Matching
2.1 High Robustness: Strong Anti-Interference Capability
The most significant technical advantage of geometric matching is its excellent robustness, enabling it to work stably in harsh industrial environments. In actual production sites, lighting conditions are often difficult to maintain constant, workpiece surfaces may have oil stains, dust, or minor scratches, and product colors may vary between batches. Traditional grayscale matching methods often perform poorly when facing these interference factors, while geometric matching, with its unique technical characteristics, can effectively respond to these challenges.
- Illumination invariance: is one of the core advantages of geometric matching. Since geometric matching focuses on object shape structures rather than grayscale values, even with significant environmental lighting changes, as long as object contours are clearly distinguishable, matching algorithms can accurately identify them. This means systems do not require complex and expensive constant light source equipment, reducing the cost and maintenance difficulty of vision systems.
- Color independence: enables geometric matching to handle detection tasks for multi-color products. In many application scenarios, the same product model may have different color variants, or products themselves may be multi-colored. Geometric matching can identify all color variants based on a single template by extracting common shape features, greatly simplifying system configuration and maintenance work.
- Anti-occlusion capability:allows geometric matching to complete recognition even when targets are partially occluded. In actual production, products may be partially occluded due to stacking, incomplete packaging, and other reasons. Modern geometric matching algorithms employ local feature matching strategies, able to infer complete pose information as long as key feature points of targets are visible.
2.2 High Precision: Sub-Pixel Level Positioning
Industrial automation has increasingly stringent requirements for positioning accuracy. Particularly in high-end manufacturing fields such as precision electronics, semiconductors, and medical devices, positioning errors need to be controlled at micrometer or even sub-micrometer levels. Geometric matching technology, through advanced algorithm design, can achieve positioning accuracy far exceeding image resolution.
- Sub-pixel interpolation technology: is key to achieving high-precision positioning. Based on pixel-level matching, algorithms estimate continuous positions between pixels through mathematical interpolation methods, improving positioning accuracy from integer pixels to decimal pixels. Common interpolation methods include bilinear interpolation, bicubic interpolation, and spline interpolation, which can improve positioning accuracy to 0.1 pixels or even 0.01 pixel levels.
- Multi-scale optimization strategies: further enhance positioning accuracy. Algorithms first quickly locate the approximate position of targets at coarse scales, then gradually refine to fine scales for precise positioning. This coarse-to-fine iterative optimization process ensures both computational efficiency and high precision of final results.
- Error compensation mechanisms*: help systems overcome systematic errors such as lens distortion and mechanical vibration. Through camera calibration and coordinate transformation, geometric matching systems can precisely map image coordinate systems to robot or machine tool working coordinate systems, achieving truly high-precision positioning control.
2.3 High Speed: Real-Time Processing Capability
On modern high-speed production lines, vision systems must complete image acquisition, processing, and decision-making in extremely short times to keep pace with production rhythms. Geometric matching technology, through years of algorithm optimization and hardware acceleration, has achieved millisecond or even sub-millisecond processing speeds.
- Algorithm optimization: is the primary factor in speed enhancement. Modern geometric matching algorithms employ multiple acceleration technologies:
- Pyramid search: constructing image pyramids, quickly searching at low-resolution layers first, then precisely positioning at high-resolution layers, significantly reducing computation
- Region limitation: limiting search ranges based on prior knowledge, avoiding redundant computation of full-image search
- Feature screening: intelligently selecting the most discriminative feature points, reducing invalid matching attempts
- Early stopping strategy: terminating search early when match scores reach thresholds, saving processing time
- Hardware acceleration: provides powerful support for high-speed processing. Modern machine vision systems widely adopt multi-core CPUs, GPU parallel computing, FPGA hardware acceleration, and other technologies, distributing computationally intensive image processing tasks to multiple processing units for parallel execution. The use of SSE, SSE2, and SSE3 instruction set acceleration technologies further enhances processing efficiency, enabling complex geometric matching algorithms to achieve real-time processing in industrial settings.
2.4 Ease of Use: Modularization and Visualization
With the popularization of machine vision technology, lowering usage barriers and improving development efficiency have become important development directions. Modern geometric matching software platforms, through modular design and visual programming, enable engineers without deep programming backgrounds to quickly build vision application systems.
- Modular tool design: encapsulates complex vision algorithms into independent functional modules. Users can complete complex detection processes simply by combining different tool modules through drag-and-drop, greatly shortening development cycles. This “building block” development model makes vision system construction as simple and intuitive as building with LEGO.
- Graphical parameter adjustment: makes algorithm optimization easier. Traditional vision system development required writing extensive code to adjust algorithm parameters, while modern platforms provide interactive parameter adjustment interfaces, enabling engineers to observe the effects of parameter changes on matching results in real-time and quickly find optimal configurations.
- Rich preset templates: further accelerate development processes. For common application scenarios, software platforms provide numerous pre-configured detection templates. Users only need to make minor adjustments based on actual needs to quickly deploy usable vision systems.
3. Core Roles of Geometric Matching in Industrial Fields
3.1 Foundation of Intelligent Manufacturing: Precise Positioning and Guidance
In intelligent manufacturing systems, geometric matching technology assumes the important role of “eyes,” providing precise visual positioning capabilities for automated equipment. This capability is crucial for achieving flexible production, improving production efficiency, and ensuring product quality.
- Robot vision guidance systems: represent one of the most typical application scenarios for geometric matching. In traditional industrial robot applications, workpieces must be precisely placed in predetermined positions for robots to operate according to fixed programs. This method lacks flexibility and has extremely high requirements for feeding accuracy. Robots equipped with geometric matching vision systems can automatically identify actual positions and poses of workpieces, dynamically adjusting operation paths to achieve intelligent operation of “see where, grab where.”

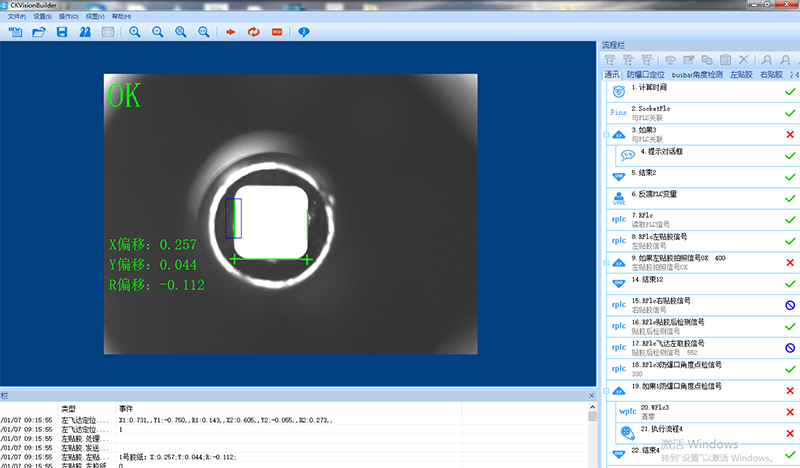
Robotic manipulators can use contour matching tools to obtain XY coordinate values of object center positions, send position data to manipulator controllers via TCP/IP, and grasp parts to designated positions. This application has been widely used in electronic product assembly, automotive parts assembly, food packaging, and other fields. For example, in mobile phone manufacturing processes, vision systems can precisely locate positions of screens, motherboards, batteries, and other components, guiding robotic hands to complete high-precision assembly operations with assembly accuracy controlled within 0.02 millimeters.
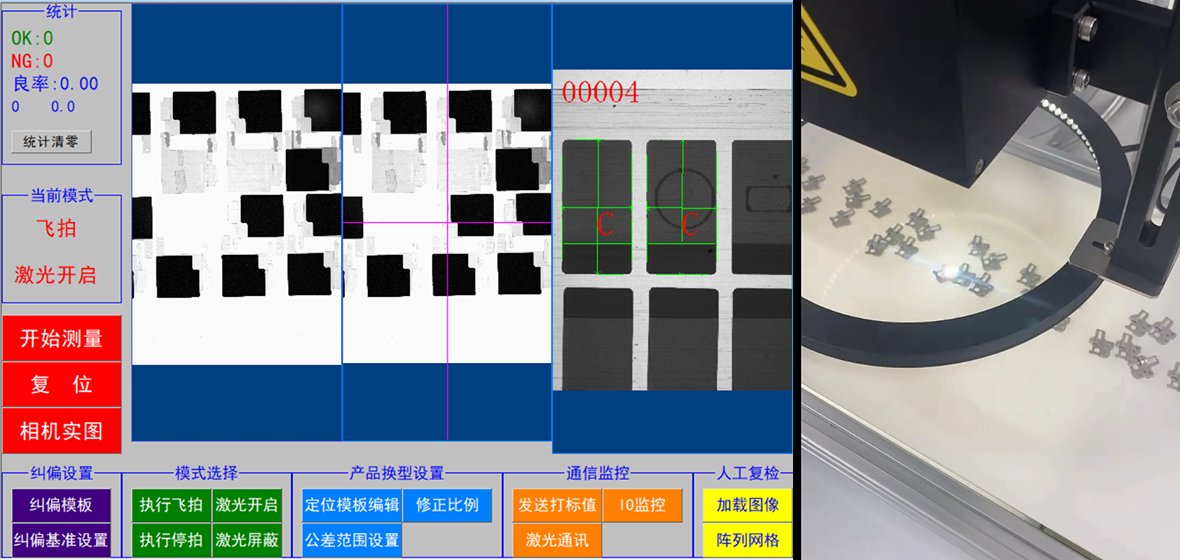
- Laser processing positioning systems: demonstrate the value of geometric matching in precision machining fields. Laser welding, laser cutting, laser marking, and other processes all require extremely high positioning accuracy. Traditional mechanical positioning methods struggle to meet flexible production demands. Through geometric matching technology, systems can quickly identify marking points or feature contours on workpieces, calculate precise positions and angular deviations of workpieces, and correct laser processing paths in real-time, ensuring processing accuracy and consistency.
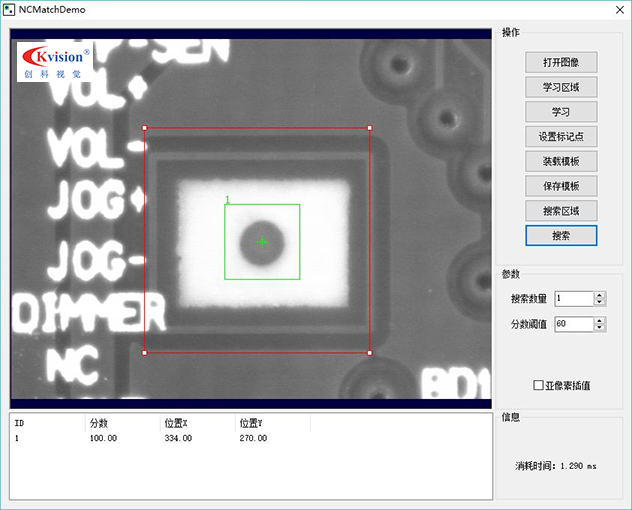
- Pick-and-place machine vision positioning: is a key application in electronic manufacturing. In SMT pick-and-place processes, tiny electronic components must be precisely mounted to designated positions on PCB boards, with position errors controlled within tens of micrometers. Geometric matching systems achieve high-speed, high-precision positioning by identifying Mark points on PCB boards and component contours, ensuring mounting quality. Modern high-speed pick-and-place machines, combined with vision systems, can mount tens of thousands of components per hour with yield rates exceeding 99.99%.
3.2 Weapon of Quality Control: Defect Detection and Measurement
Product quality is the lifeline of manufacturing, and geometric matching technology provides powerful technical means for quality control, achieving precision and efficiency difficult to attain with manual inspection.
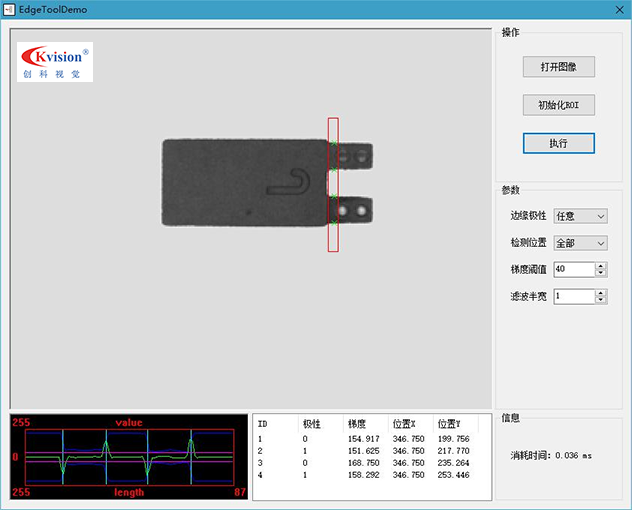
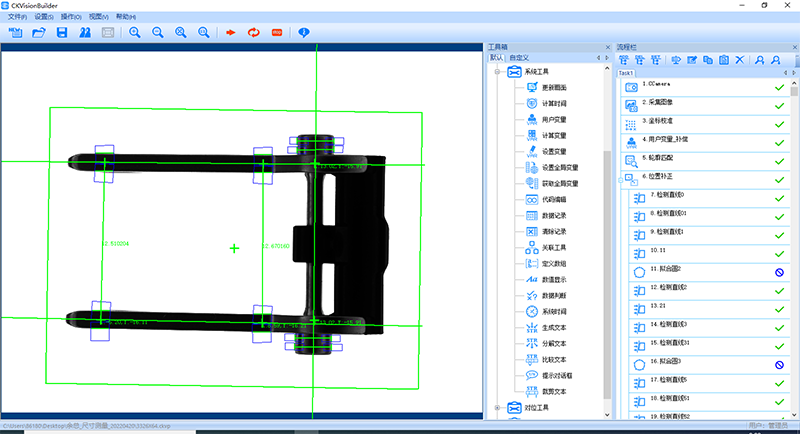
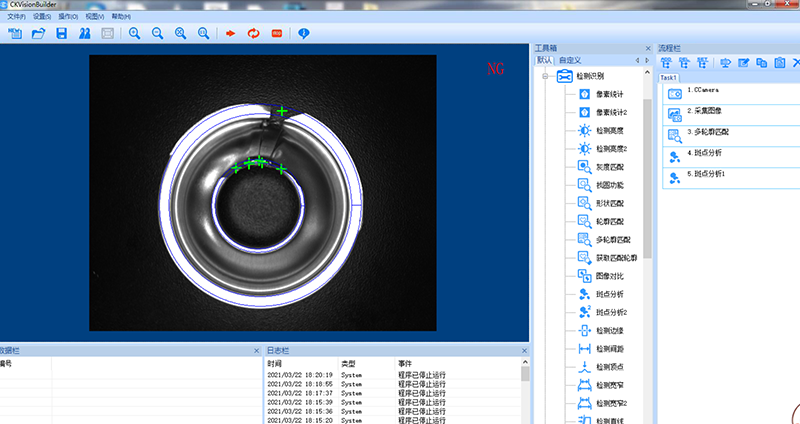
- Dimensional measurement and tolerance inspection: are fundamental applications of geometric matching in quality control. By identifying workpiece contours and feature points, systems can precisely measure various geometric parameters: length, width, diameter, angle, roundness, straightness, etc. Software integrates edge detection, line detection, circle detection, geometric calculation, and other algorithms to complete complex geometric measurement tasks. Compared with traditional contact measurement methods, vision measurement has advantages of non-contact, high speed, and high precision, particularly suitable for measuring soft materials, precision parts, and high-temperature workpieces.
- Shape matching and classification: help enterprises achieve automated product sorting and quality judgment. In automotive manufacturing, systems can identify parts of different models, guiding robots for classified storage. In food processing industries, vision systems can automatically grade products based on shape and size, improving packaging efficiency and product consistency.
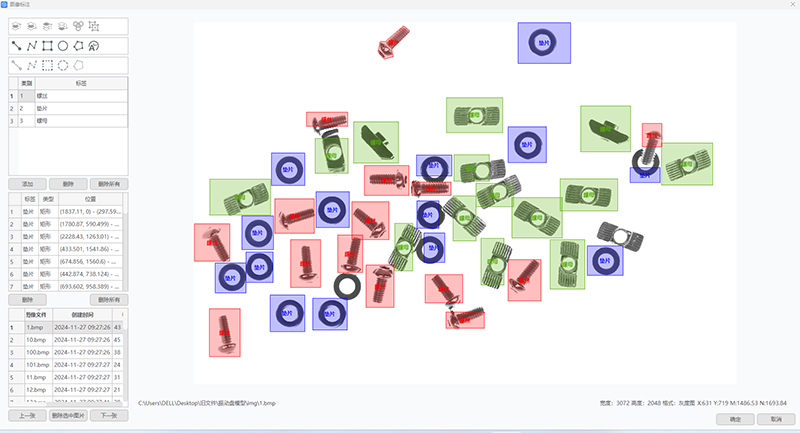
- Defect detection and positioning: are key links in ensuring product quality. Geometric matching technology can detect various defects on product surfaces: scratches, dents, burrs, deformation, missing parts, etc. Systems first establish geometric templates of standard products, then compare products to be inspected with templates. Any geometric features deviating from standards are identified as potential defects. This method is particularly suitable for detecting irregularly shaped defects, such as deformation of plastic parts, notches in metal parts, and breakage of glass.
- Assembly completeness inspection: ensures products are assembled without omissions. In complex product assembly processes, missing components is a common quality issue. Geometric matching systems can identify geometric features of various parts on products, verifying whether all necessary components have been correctly installed and whether installation positions and angles meet requirements. For example, on automotive engine assembly lines, vision systems can check whether bolts are fully tightened, whether oil pipes are correctly connected, and whether sensors are installed in place.
3.3 Support for Production Line Traceability: Identification and Code Reading
In modern manufacturing, product full lifecycle traceability has become an important link in quality management. Geometric matching technology plays an irreplaceable role in product identification and information reading.
- Barcode and QR code reading: is the most common product identification recognition application. Systems can read various types of one-dimensional barcodes and two-dimensional codes, such as QR codes and DataMatrix codes, reliably identifying them even when codes are stained, blurred, or tilted. Geometric matching technology helps systems quickly locate code positions and orientations, providing accurate input for subsequent code parsing. In logistics warehousing, production management, product traceability, and other scenarios, high-speed, high-accuracy code reading capability is the foundation for achieving intelligent management.
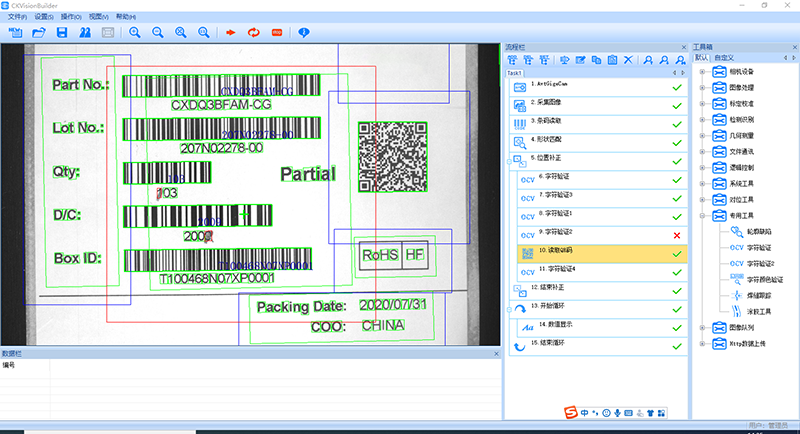
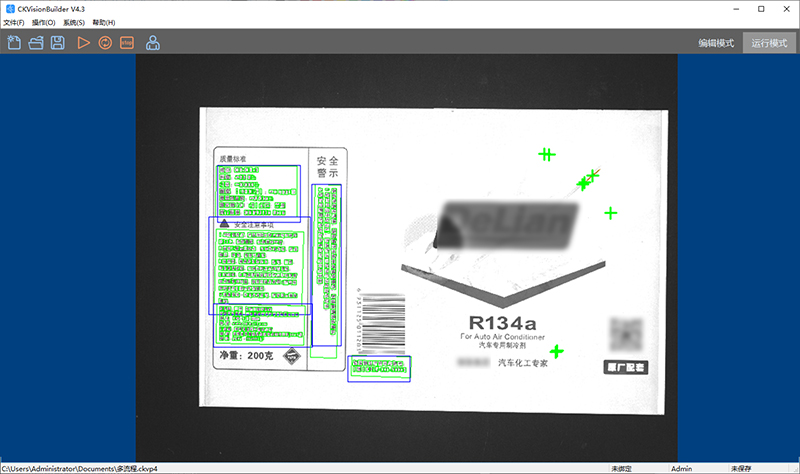
- Optical character recognition (OCR): enables systems to read text information printed or engraved on products. By positioning character regions through geometric matching technology and combining with character recognition algorithms, systems can identify product batch numbers, production dates, serial numbers, and other information, achieving automated information entry and traceability. In pharmaceuticals, food, and other industries with strict traceability requirements, OCR technology has become standard.
- Feature recognition and classification: enable systems to intelligently classify based on geometric features of products. On mixed production lines, different product models may flow through vision inspection stations simultaneously, requiring systems to automatically identify product types and invoke corresponding inspection programs. Geometric matching can accurately distinguish different models by identifying unique shape features of products, achieving flexible mixed-line production.
3.4 Industry Application Breadth: Cross-Domain Adaptability
The application scope of geometric matching technology is extremely broad, covering almost all industrial fields requiring visual recognition. It has been widely applied in electronics, semiconductors, lasers, PCB, packaging, measurement, monitoring, hardware printing, pharmaceuticals, and other industries.
- Electronics manufacturing: is one of the fields with the most intensive application of geometric matching technology. From chip packaging, PCB inspection, component placement to finished product inspection, the entire production process relies on precise visual positioning and detection. For example, in chip bonding processes, systems need to precisely weld gold wires with diameters of only 25 micrometers to chip pads, with positioning accuracy requirements reaching ±5 micrometers. Such extreme precision requirements can only be met by geometric matching technology.
- Automotive manufacturing: utilizes geometric matching to achieve assembly and inspection of key components. Body welding positioning, engine assembly guidance, tire installation inspection, headlight installation verification, and other links all employ visual positioning technology. In new energy vehicle battery pack assembly, geometric matching systems can precisely identify positions of hundreds of battery cells, ensuring each battery is correctly installed with position deviations controlled within 0.5 millimeters.
- Pharmaceutical industry: has extremely strict requirements for product quality and traceability. Geometric matching technology plays important roles in pharmaceutical production and inspection. From tablet shape and size inspection to blister packaging completeness verification, from label correct application to batch number reading and identification, vision systems run through the entire production process, ensuring every pill meets quality standards and every package can be traced to its source.
- Food and beverage industry: faces dual challenges of high-speed production and strict hygiene standards. Geometric matching technology provides efficient solutions. On filling production lines, vision systems inspect whether bottle caps are correctly installed, whether labels are properly applied, and whether liquid levels meet standards. In packaging stages, systems verify product quantities and arrangement correctness. In boxing stages, vision guides robots to precisely grasp and place products, with production speeds reaching hundreds of items per minute.
- Semiconductor industry: has reached extreme requirements for precision. Geometric matching technology has applications in wafer inspection, mask alignment, chip sorting, and other stages. In wafer defect detection, systems need to identify micrometer-level or even nanometer-level defects, imposing extremely high requirements on algorithm precision and resolution. Modern semiconductor vision systems combine geometric matching and deep learning technologies, detecting tiny defects invisible to the human eye and ensuring chip yield.
4、Development Evolution of Geometric Matching Technology
4.1 Traditional Methods: From Template Matching to Feature Matching
The development of geometric matching technology has undergone an evolution from simple to complex, from rigid to flexible. Early template matching methods directly compared image grayscale values. While simple to implement, they had poor robustness and could not handle rotation and scaling transformations. With the development of computer vision theory, feature-based matching methods gradually became mainstream.
- Edge detection and contour extraction: are classic methods of geometric matching. Classic algorithms such as Canny edge detection and Sobel operators can extract edge information of objects from images, forming contour descriptions. By comparing shape features of contours, systems can recognize and locate target objects. This method is insensitive to illumination changes but susceptible to noise interference.
- Corner detection and feature point matching: provide more stable matching foundations. Algorithms such as Harris corners and FAST corners can detect key feature points in images. These feature points are typically located at corners of object contours or positions with significant curvature changes. By matching spatial distribution patterns of feature points, systems can accurately recognize objects and estimate their poses.
- Hough transform: is specifically used to detect specific geometric shapes. Hough line detection, Hough circle detection, and other methods can reliably identify basic geometric primitives such as straight lines and circles in noisy images, widely applied in positioning and measurement of industrial parts.
4.2 Modern Algorithms: From SIFT to Deep Learning
At the beginning of the 21st century, a series of innovative feature description algorithms drove major progress in geometric matching technology. Algorithms such as SIFT (Scale-Invariant Feature Transform) and SURF (Speeded-Up Robust Features) can extract feature descriptors invariant to scale, rotation, and illumination changes, greatly improving matching robustness. These algorithms have achieved tremendous success in image stitching, object recognition, 3D reconstruction, and other fields.
In recent years, the rise of deep learning technology has brought revolutionary changes to geometric matching. Convolutional neural networks (CNNs) can automatically learn image features without manually designing feature extractors. Deep learning-based object detection algorithms, such as R-CNN series, YOLO series, and SSD, surpass traditional methods in both speed and accuracy.
- The fusion of deep learning and geometric matching: is becoming a new development trend. On one hand, deep learning is used to extract more robust geometric features, improving matching accuracy. On the other hand, traditional geometric constraints and optimization methods are used to regularize deep learning models, improving their interpretability and generalization capabilities. This fusion approach inherits both the high precision and high efficiency of traditional geometric matching and leverages the powerful expressive capabilities of deep learning, representing the future direction of technological development.
4.3 Hardware Progress: From CPU to Heterogeneous Computing
The practical application of geometric matching algorithms depends not only on algorithm advancement but also benefits from rapid development of computing hardware. Early vision systems ran on ordinary PCs with limited processing speeds, struggling to meet industrial real-time requirements. With the emergence of specialized hardware, vision system performance has achieved leapfrog improvements.
- Multi-core CPU parallel computing: fully utilizes modern processor capabilities. By distributing matching tasks to multiple cores for parallel execution, overall processing speed is significantly improved. Modern vision software platforms generally support multi-threading and can automatically utilize all available CPU cores, making full use of hardware performance.
- GPU acceleration: provides unprecedented computing power for geometric matching. Graphics processing units have thousands of computing cores capable of executing the same operation on massive data simultaneously. This massively parallel architecture is particularly suitable for image processing tasks. Through CUDA, OpenCL, and other programming frameworks, developers can migrate geometric matching algorithms to GPUs, achieving tens or even hundreds of times speed improvements.
- FPGA hardware acceleration: offers another technical path. Field Programmable Gate Arrays can be customized to design specialized circuits for specific algorithms, achieving optimal performance and power consumption balance. In high-speed, high-throughput application scenarios, FPGA-based vision systems can process images at rates reaching thousands of frames per second, meeting the needs of ultra-high-speed production lines.
- Heterogeneous computing platforms: integrate multiple types of processors, enabling each to leverage its strengths. Modern advanced vision systems typically employ CPU+GPU or CPU+FPGA architectures. CPUs handle logic control and algorithm scheduling, while GPUs or FPGAs are responsible for intensive image processing computations. This collaborative working mode achieves optimal overall system performance.
5、Future Outlook

5.1 Integration with Artificial Intelligence
The future of geometric matching technology lies in deep integration with artificial intelligence. Deep learning has demonstrated powerful capabilities in image understanding, while traditional geometric matching possesses advantages in precision and interpretability. Combining the two can create more intelligent and reliable vision systems.
- Intelligent feature learning: will replace manual feature design. Deep neural networks can automatically discover optimal feature representations from massive training data, adapting to various complex application scenarios. This data-driven approach will greatly reduce the difficulty of system development and tuning.
- Self-adaptive matching strategies: will enable systems to automatically adjust matching parameters and strategies according to actual conditions. Through reinforcement learning technology, vision systems can continuously optimize their behavior through interaction with environments, achieving true intelligence.
- Multi-modal information fusion:will enhance system understanding capabilities. Future vision systems will not only process images but also integrate information from multiple sensors such as 3D point clouds and thermal imaging, achieving more comprehensive and accurate target recognition and positioning.
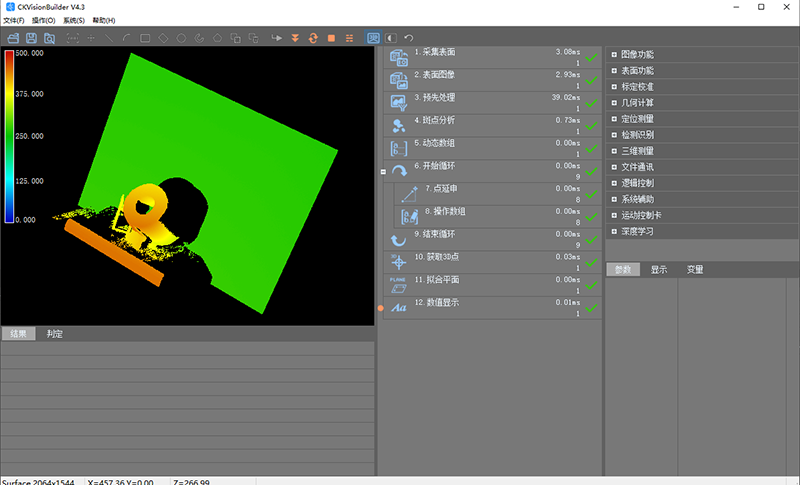
5.2 Development Toward 3D Vision
Traditional 2D geometric matching can only obtain position information of objects in image planes, unable to perceive depth information. With the maturation of 3D vision technology, geometric matching is developing toward three-dimensional directions.
- Structured light 3D vision: obtains surface 3D information of objects by projecting specific light patterns. Combined with 3D geometric matching algorithms, systems can achieve six-degree-of-freedom pose estimation (3D position + 3D orientation), meeting the needs of complex spatial operations.
- Binocular stereo vision: simulates human binocular depth perception principles, calculating distance information through matching left and right camera images. This technology is particularly suitable for large-scene applications such as autonomous driving and mobile robots.
- Time-of-flight (ToF) cameras: directly measure distance information of each pixel, obtaining complete depth images. ToF technology has advantages of simple principles, fast speed, and strong anti-interference capabilities, showing broad application prospects in industrial automation.
5.3 Enhancement of Edge Computing Capabilities
With the development of Internet of Things and Industry 4.0, more and more vision systems are deployed at production line edges, requiring strong local processing capabilities to reduce dependence on cloud computing, lower latency, and improve system reliability.
- Embedded vision systems: integrate cameras, processors, and algorithm software into compact devices, achieving plug-and-play vision solutions. These systems have advantages of small size, low power consumption, and easy deployment, suitable for distributed vision applications.
- Intelligent cameras: integrate complete vision processing capabilities, from image acquisition to algorithm execution to result output, all completed within cameras. This integration design greatly simplifies system architecture, reduces wiring complexity, and improves overall system stability.
- Edge AI chips: provide powerful computing support for edge vision systems. Specialized AI acceleration chips such as NVIDIA Jetson series and Intel Movidius series can run complex deep learning models on low-power platforms, enabling embedded systems to possess intelligence levels comparable to cloud systems.
5.4 Building Open Ecosystems
The future of geometric matching technology lies not only in algorithm and hardware advancement but also in establishing open, shared technology ecosystems. Through standardization, modularization, and platformization, lower usage barriers, promote technology dissemination, and accelerate application innovation.
- Open source algorithm libraries: will provide developers with rich technical resources. Projects like OpenCV and TensorFlow have become infrastructure in the field of computer vision. More specialized geometric matching algorithm libraries will emerge, providing developers with ready-to-use, high-quality technical solutions.
- Standardized interfaces: will facilitate integration between different systems. By defining unified data formats and communication protocols, vision systems from different manufacturers can seamlessly integrate, avoiding technical lock-in and reducing user costs.
- Cloud-edge collaboration platforms: will enable full-process management from algorithm development to deployment and operation. Developers can train and optimize algorithms in cloud environments, then deploy models to edge devices with one click. The platform also provides remote monitoring, online updates, and other services, ensuring systems remain in optimal states.
Conclusion
Geometric matching technology, as a core component of machine vision, is profoundly changing faces of modern manufacturing. From basic positioning and detection to intelligent decision-making and optimization, from two-dimensional image processing to three-dimensional spatial perception, from independent system operation to networked collaborative work, geometric matching technology is evolving in more advanced directions.
In future intelligent manufacturing systems, geometric matching will continue to play irreplaceable roles. It will become more intelligent, precisely understanding intent; more flexible, adapting to various complex scenarios; more efficient, meeting higher production rhythm requirements; more reliable, ensuring product quality and production safety. Through continuous technological innovation and application expansion, geometric matching will provide stronger visual perception capabilities for intelligent manufacturing, promoting industries toward higher levels of development.
For enterprises, mastering and applying geometric matching technology is not only a means to improve production efficiency and product quality but also a key path to achieving intelligent transformation and upgrading. With continuous technological progress and gradual cost reduction, geometric matching will enter more industries and fields, creating greater value for society. Future factories will be factories with “vision,” every equipment possessing intelligent “eyes,” every process achieving precise control—and geometric matching technology is the key to opening this future.