
Introduction
In the field of machine vision, matching technology is one of the core technologies for object positioning, recognition, and tracking. From early pattern matching, to geometric matching, contour matching, and today’s AI deep learning era, matching algorithms have evolved over decades. This paper systematically reviews the development of this technology, discusses algorithmic paths for performance optimization, and re-examines the value of traditional matching methods amid the AI wave.
1. Development History of Matching Technology
1.1 Origin of Pattern Matching
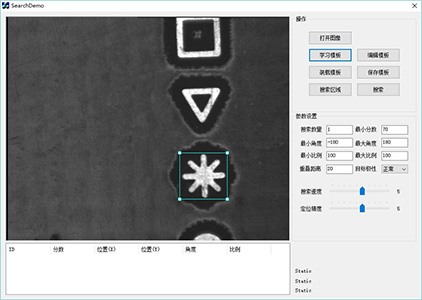
As the most primitive and fundamental recognition method, pattern matching locates and identifies specific objects in images. It was applied to industrial vision inspection in the 1970s.
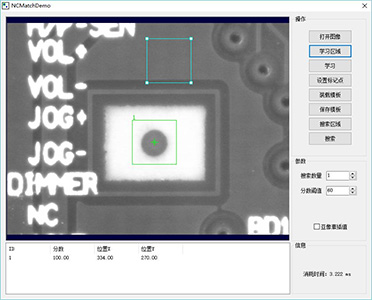
Early pattern matching adopted gray-level-based matching, which compares pixel-wise gray values between a template and a target image. Common similarity metrics include Normalized Cross-Correlation (NCC), Mean Absolute Difference (MAD), and Mean Square Difference (MSD).
However, pattern matching is limited to translational movement; it fails if the target rotates or scales. This fundamental flaw drove researchers to explore more robust methods.
1.2 Breakthrough of Geometric Matching
To overcome sensitivity to rotation and scaling, geometric matching emerged. It extracts edges, gradients, and gradient directions as matching features, achieving strong robustness against lighting changes, distortion, and occlusion.
The key advantage is reliance on edge gradient direction rather than raw gray values. This approach is widely adopted in commercial vision libraries, such as Halcon Shape-Based Matching and Cognex PatMax.
Cognex PatMax, a typical geometric matching algorithm, builds edge-geometric models and reliably handles rotation, scaling, and occlusion in industrial inspection.
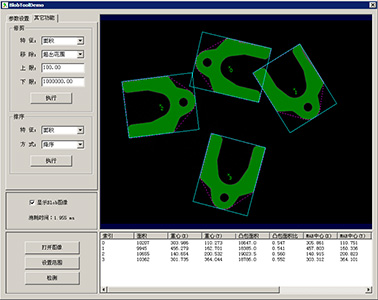
1.3 Refinement of Contour Matching
Contour matching, an important branch of geometric matching, focuses on object contour extraction. It first detects edges to obtain continuous contours, then uses shape descriptors (Fourier descriptors, invariant moments, etc.) for representation and matching.
It excels at regular-shaped, clear-boundary objects and is widely used in component inspection and PCB testing. Compared with full geometric matching, it is faster but demands higher image quality and edge accuracy.
1.4 Rise of Feature-Point Matching
With advances in computer vision, local feature-point matching became mainstream.
- 1977: Moravec proposed the “interest point” concept.
- Later: Harris corner detector, SUSAN operator, etc.
In the 2000s, Scale-Invariant Feature Transform (SIFT) became a milestone. Proposed by David Lowe in 1999 and refined in 2004, it extracts scale- and rotation-invariant keypoints. Improved versions such as SURF and ORB expanded the application scope dramatically.
2. Algorithmic Strategies for Improving Matching Performance
2.1 Multi-Scale Feature Extraction
To handle scale variations, multi-scale analysis is critical. SIFT achieves scale invariance via scale-space construction, a standard strategy adopted by many later algorithms.
2.2 Fast Matching Algorithms
Exhaustive searching is computationally expensive. Accelerated methods include:
- Sequential Similarity Detection Algorithm
- Two-level template matching
- Hierarchical sequential matching
- Multi-subregion correlation matching
These reduce complexity via hierarchical search, region restriction, and early termination.
Notably, the LineMode algorithm (gradient-direction based) uses dozens of gradient points for matching. Optimizations enable 1MP image processing in 60ms and 360 templates matched in 7ms, delivering exceptional speed.
2.3 Outlier Rejection Techniques
Initial matches contain many false matches. RANSAC (Random Sample Consensus) is the classic method to identify inliers via random sampling and model fitting.
Other methods:
- LPM (Locally Preserving Matching)
- GMS (Grid-based Motion Statistics)
- Hierarchical motion-consistency-based matching
All use geometric constraints to reject outliers.
2.4 Introduction of Deep Learning
Recently, deep learning has been applied to feature extraction and matching. End-to-end matching networks such as HomographyNet and LoFTR learn discriminative features automatically and perform well in complex-deformation scenarios.
3. Core Industrial Roles of Pattern Matching
3.1 Precision Positioning and Guidance
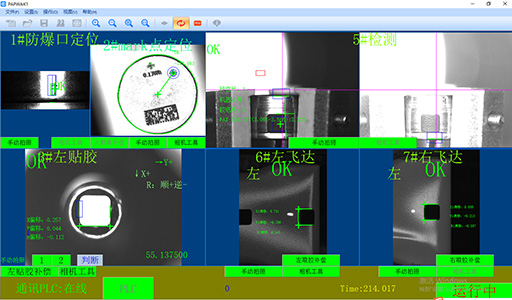
On automated production lines, pattern matching is foundational for part localization. It provides position and pose data for robot grasping, assembly, laser marking, and welding. Geometric matching is the top choice for 2D vision positioning due to rotation and scale invariance.
3.2 Quality Inspection and Defect Recognition
In quality control, matching compares products against standard templates to detect defects, missing parts, and misalignment. It is widely used in electronics and automotive component inspection.
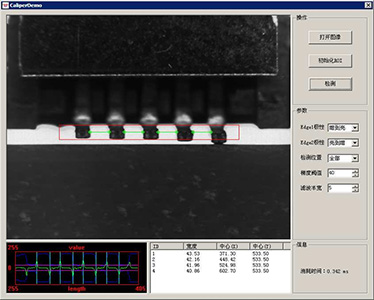
3.3 Metrology and Measurement
Matching-based measurement achieves sub-pixel accuracy, enabling precise measurement of dimensions, distances, and angles. It is indispensable in semiconductor and precision machining.
3.4 OCR and Barcode Reading
Although deep learning dominates general OCR, traditional template matching remains popular for fixed fonts and standard barcodes due to high speed and low resource usage.
4. Value of Traditional Matching Technology in the AI Wave
4.1 Comparison Between Deep Learning and Traditional Methods
Traditional methods use handcrafted features (e.g., descriptors), which become cumbersome as class numbers grow. Deep learning enables end-to-end learning: neural networks automatically discover discriminative patterns from labeled data.
Although deep learning outperforms traditional algorithms on average, it is not a universal solution. Many applications are better served by conventional vision methods.
4.2 Unique Advantages of Traditional Matching
4.2.1 Determinism and Interpretability
Traditional matching is based on explicit mathematical and geometric models, with predictable, interpretable behavior. Engineers can clearly diagnose failures (lighting, template, parameters). Deep learning remains a “black box” with limited explainability.
4.2.2 Low Data Requirements
Deep learning demands large labeled datasets. Traditional matching requires only one standard template, making it ideal for small-sample scenarios such as new products and customized production.
4.2.3 Low Computational Resource Consumption
Traditional algorithms run in real time on standard CPUs without GPUs, making them suitable for resource-constrained embedded systems. Deep learning imposes higher hardware costs and power consumption.
4.2.4 Excellent Real-Time Performance
Optimized geometric matching (e.g., LineMode) completes matching in milliseconds, meeting high-speed line requirements. Traditional methods still lead in ultra-low-latency applications.
4.2.5 Robustness and Stability
In industrial environments, stability > extreme accuracy. Traditional methods have decades of field validation and perform reliably under controlled lighting and regular shapes. Deep learning may fail unexpectedly on out-of-distribution samples.
4.3 Application Scenarios of Traditional Matching in the AI Era
4.3.1 Industrial Inspection and Manufacturing
In electronics, machining, and automotive industries, many tasks feature:
- Fixed target shapes
- Controlled lighting
- High speed requirements
- Low false-detection tolerance
Geometric matching often achieves >99.9% accuracy for PCB component positioning and screw-hole detection, with simplicity and speed.
4.3.2 Medical Image Registration
In medical imaging, traditional feature-point methods (e.g., SIFT) remain critical for rigid registration due to good deformation adaptation and no need for large training datasets.
4.3.3 Embedded Vision Systems
On drones, robots, and smart cameras, lightweight traditional matching is preferred due to power and computing constraints, enabling real-time positioning without expensive GPUs.
4.3.4 Front-End Processing in Hybrid Architectures
Even in deep learning-dominant systems, traditional matching serves as a front-end module:
- Fast template matching for coarse ROI location
- Deep learning for fine recognition
This hybrid design balances speed and accuracy.
4.4 Integration Trend of Traditional and AI Technologies
The future is not replacement, but deep fusion:
- Use deep learning to enhance traditional algorithms (learn robust descriptors, optimize parameters).
- Embed geometric constraints and prior knowledge into deep models to improve interpretability and generalization.
Combined systems boost precision, simplify tasks, and improve flexibility. This synergy has been validated in autonomous driving and industrial inspection.
5. Outlook and Reflections
5.1 Insights from Technological Evolution
Matching technology evolved from simplicity to complexity, from handcrafted design to automated learning. Yet simpler methods retain value. Different tools suit different scenarios; the key is matching application needs.
5.2 Wisdom in Engineering Practice
In industry, “good enough” often beats “state-of-the-art”. If simple gray-level matching suffices, deep learning is unnecessary. Engineers must balance performance, cost, cycle time, and maintainability.
5.3 Technological Philosophy in the AI Era
AI does not eliminate traditional technologies; it enriches the toolbox. Like mechanical brakes in autonomous vehicles, traditional matching provides redundancy and verification for critical industrial systems, enhancing reliability.
Even modern deep-learning feature extractors inherit ideas from SIFT. Traditional algorithms represent foundational wisdom, not obstacles.
Conclusion
From pattern matching to geometric matching, contour matching, and deep learning, machine vision matching has traveled a long evolutionary path. In the AI era, traditional matching methods are not obsolete—they occupy a clear position in the new technological ecosystem.
Their strengths in determinism, interpretability, low resource usage, and real-time performance make them irreplaceable in many industrial scenarios.
Future vision systems will likely integrate traditional and AI technologies, combining the learning power of deep learning with the reliability and efficiency of conventional algorithms. For engineers, mastering the principles and applicable scenarios of various matching methods and using tools flexibly is the key to building practical vision systems.
The value of technology lies not in novelty, but in solving real problems. “Old” technologies such as pattern matching and geometric matching remain vibrant today. Together with AI, they continue to advance machine vision.