

Abstract
In recent years, flexible vibratory feeders have rapidly penetrated automated production lines in 3C electronics, auto parts, medical devices and other fields due to their advantages of multi‑material compatibility and fast changeover. However, without highly reliable machine vision support, the potential of flexible feeding systems will be greatly compromised. This paper deeply analyzes the working principle and core challenges of flexible vibratory feeders, systematically elaborates the key role of CkVision image processors in feature detection, pose recognition and real‑time feedback control, reveals the advantages of capacity improvement, changeover efficiency and quality assurance brought by their deep integration through typical cases, and finally forecasts future development trends.
1. Introduction: The Feeding Revolution Under the Wave of Flexible Manufacturing
Against the backdrop of shrinking iteration cycles of consumer electronic products and surging demand for personalized customization, the drawbacks of traditional rigid bowl feeders—relying on specific chute tracks and requiring hours of changeover—have become increasingly prominent. A modern SMT production line often needs to handle dozens of material specifications simultaneously, and the cost and management complexity of customized bowls for a single material have become the biggest obstacles to improving flexibility. The emergence of flexible vibratory feeders is a direct response to this pain point.
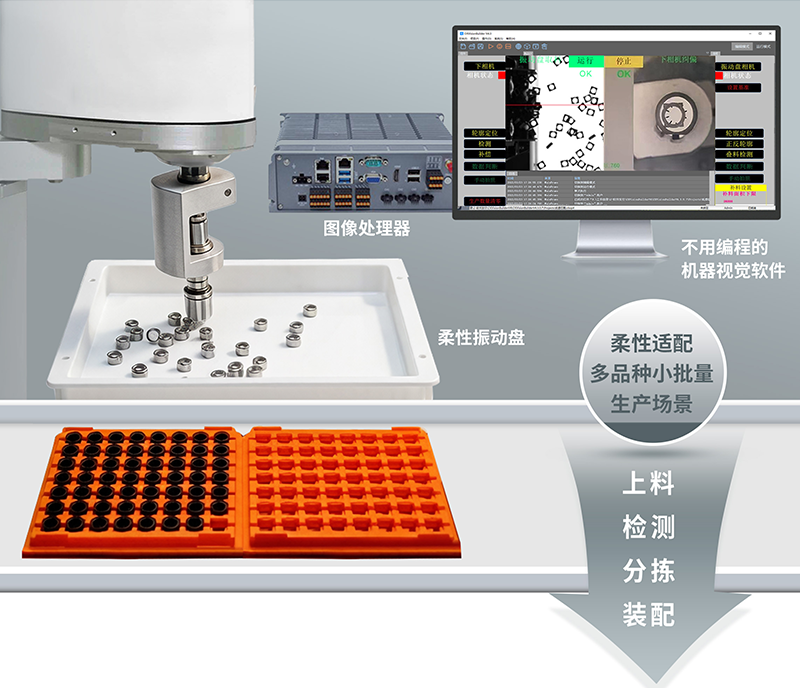
Flexible vibratory feeders replace fixed tracks with planar electromagnetic excitation or piezoelectric actuation, and replace mechanical guidance with high‑speed cameras and image processors, achieving a fundamental shift from physical constraints to visual guidance. Nevertheless, the core competitiveness of this system ultimately lies in the perception and decision‑making capabilities of the image processor—it must achieve precise positioning, pose judgment and picking guidance for parts under extreme working conditions such as high speed, strong vibration and complex backgrounds. Industrial image processors represented by CkVision have become an indispensable “brain” in flexible vibratory feeder systems with their deeply integrated vision algorithms and open interface ecosystem.
This paper comprehensively explains the complete picture of the collaborative operation of flexible vibratory feeders and CkVision image processors from three dimensions: technical principle, system architecture and practical cases, providing references for automation engineers, production line planners and smart manufacturing decision‑makers.
2. Working Principle and Technical Characteristics of Flexible Vibratory Feeders
2.1 Core Driving Mechanism
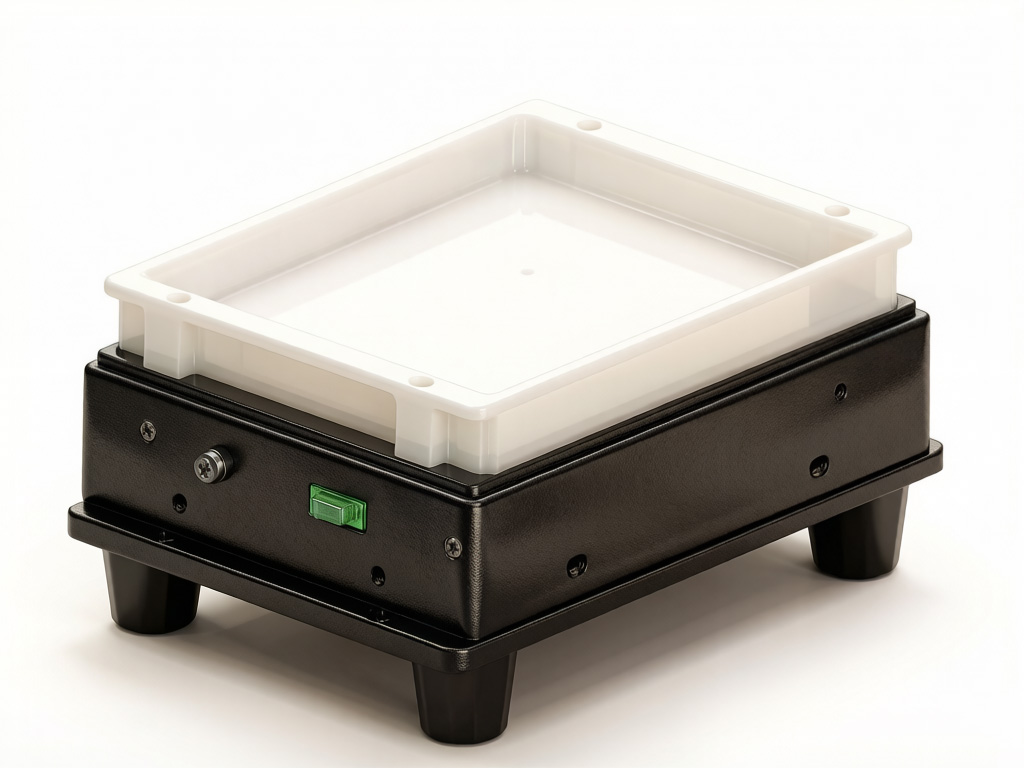
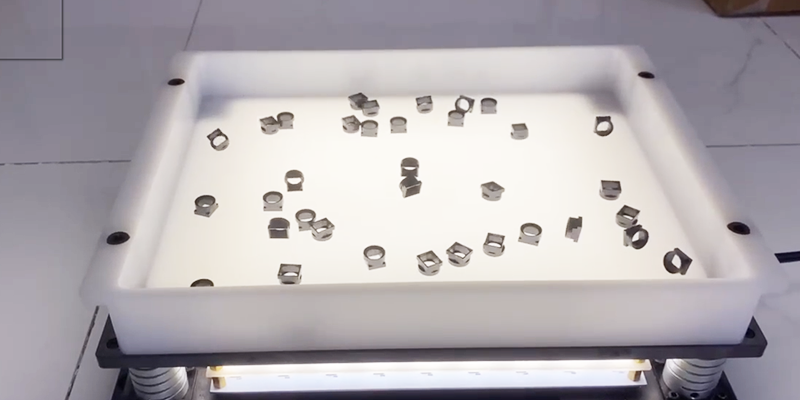
The tray of a flexible vibratory feeder is usually a flat stainless steel or epoxy fiber platform, under which multiple groups of independently controllable electromagnetic excitation units or piezoelectric ceramic arrays are arranged. By differentially controlling the phase, frequency and amplitude of each excitation unit, the system can synthesize standing waves or traveling waves in any direction on the tray, thereby driving parts to move, rotate or stop along specified paths. This software‑defined material conveying path enables the same equipment to be compatible with materials of different shapes and weights without any mechanical modification.
Common excitation schemes include: full‑plane array type (up to dozens of independent excitation points with the highest control precision), zoned type (dividing the tray into several independently controlled areas with lower cost) and single‑point high‑frequency type (suitable for small and lightweight parts). Different schemes involve trade‑offs between part compatibility range, conveying speed and system cost, requiring selection based on specific application scenarios.
2.2 Necessity of Visual Closed‑Loop Control
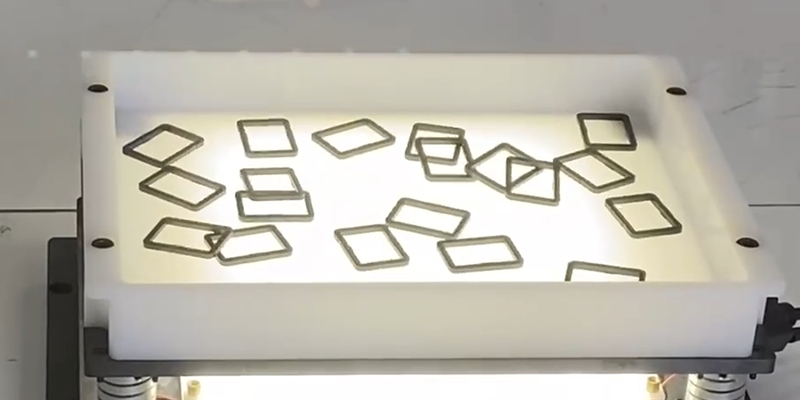
Different from traditional vibratory feeders that rely on fixed tracks to filter directions, part poses on the flexible vibratory feeder tray are completely random. The image processor needs to detect the position coordinates (X, Y), rotation angle (θ) and front/back status of each part in real time, then calculate the optimal excitation strategy through algorithms to guide parts to move to the target pose range of the picking area, and finally cooperate with robots or pneumatic picking mechanisms to complete picking.
This closed‑loop control imposes extremely stringent requirements on the image processor: detection delay must be less than 50ms (to match high‑speed picking beats), high repeated positioning accuracy must be maintained under vibration and lighting changes, multi‑part simultaneous tracking must be supported, and real‑time data exchange with vibration controllers must be available.
2.3 Major Challenges
- Part diversity: The same production line may need to handle materials spanning from 0402 chip components to M8 bolts, making the generalization ability of vision algorithms crucial.
- Reflective and transparent materials: The surface optical characteristics of metal fasteners, optical lenses, transparent plastic covers and other materials are extremely complex, posing dual challenges to lighting design and image algorithms.
- Vibration blur: Continuous tray vibration causes slight displacement of parts during exposure, requiring the cooperation of strobe light sources and extremely short exposure times to obtain clear images.
- Real‑time requirements: The end‑to‑end delay of the entire detection‑decision‑control loop directly determines the upper limit of production line beats, and any processing bottleneck will cause efficiency loss.
3. Core Technical Capabilities of CkVision Image Processor
3.1 Overview of Hardware Architecture
CkVision’s image processor is based on a high‑performance embedded computing platform, integrating an FPGA preprocessing unit and a multi‑core CPU/GPU co‑processing architecture. The FPGA undertakes time‑delay‑sensitive tasks such as image acquisition synchronization, strobe control signal output and primary filtering, while the CPU/GPU is responsible for feature extraction, deep learning inference and result output. This heterogeneous computing architecture ensures the system can run complex neural network models while maintaining millisecond‑level response.
At the interface level, CkVision image processor natively supports GigE Vision, Camera Link and USB3 Vision camera standards, and can be flexibly matched with industrial cameras of different resolutions and frame rates. The I/O interface provides multiple configurable digital I/Os to directly drive strobe light controllers, eliminating synchronization jitter caused by additional controllers. Ethernet and EtherCAT/PROFINET fieldbus interfaces ensure low‑latency data exchange with vibration controllers and upper MES systems.
3.2 Vision Algorithm System
The built‑in vision algorithm toolkit of CkVision image processor covers the complete link required for flexible feeding scenarios. At the traditional machine vision level, it provides sub‑pixel edge detection (precision up to 0.1 pixel), Blob analysis‑based part segmentation, normalized cross‑correlation (NCC) template matching and geometric feature extraction (circle, rectangle, polygon contour fitting). These algorithms are highly optimized, and single part positioning usually takes 5–15ms, providing sufficient processing margin for high‑speed scenarios.
At the deep learning level, CkVision provides lightweight convolutional neural network (CNN)‑based classification and detection models, supporting users to complete model training for custom parts through graphical annotation tools without coding. The trained model can be deployed to the inference engine with one click, and with INT8 quantization and TensorRT acceleration, achieves inference throughput equivalent to PC‑level GPUs on embedded platforms. For parts with similar shapes but different details (such as screw specification distinction, chip front/back judgment), deep learning recognition accuracy can usually exceed 99.5%.
3.3 Strobe Synchronization and Anti‑Vibration Imaging Technology
Aiming at the motion blur problem in vibratory feeder scenarios, CkVision image processor provides a precise strobe synchronization solution: based on the excitation frequency signal output by the vibration controller, the system triggers camera exposure and LED strobe flashing at specific phase points of each excitation cycle, compressing the equivalent exposure time to 50–200μs and completely eliminating motion blur caused by vibration. Strobe trigger jitter is controlled within ±1μs, ensuring highly consistent part poses in images collected across multiple cycles.
In addition, the built‑in adaptive lighting compensation algorithm of the processor can monitor the overall grayscale distribution of images in real time, dynamically adjust the LED driving current (within ±20%) to cope with exposure fluctuations caused by light source aging, ambient light interference and material color differences, greatly reducing the frequency of manual recalibration.
3.4 Multi‑Target Parallel Tracking and Priority Scheduling
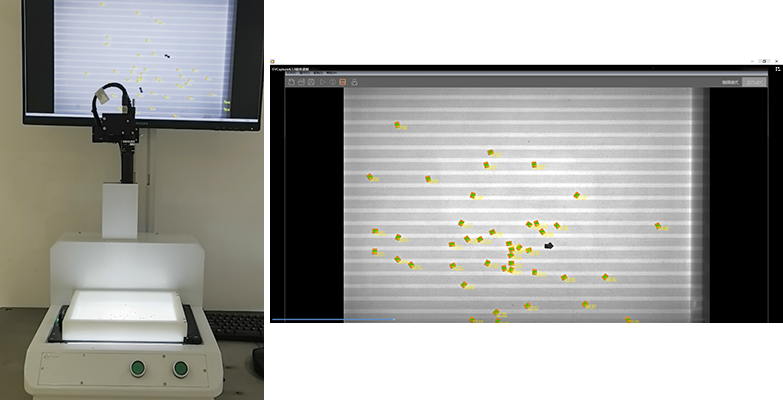
In a typical flexible vibratory feeder field of view, the number of parts present simultaneously is usually between 5 and 30. CkVision image processor adopts a Kalman filter‑based multi‑target tracking framework, maintains the motion trajectory of each part between consecutive frames, and predicts the next frame position of parts combined with vibratory feeder excitation parameters, thus maintaining tracking continuity when targets are blocked or temporarily out of the field of view.
The priority scheduling module calculates the pickable probability score in real time according to the deviation between the current pose and the target picking pose of each part, preferentially outputs the coordinates of the part with the highest score to the robot controller, and feeds back the correction path parameters of other parts to the vibration controller. This parallel scheduling mechanism significantly increases the effective picking times per unit time and reduces idle waiting.
4. System Integration Architecture and Communication Protocols
4.1 Hardware Integration Topology
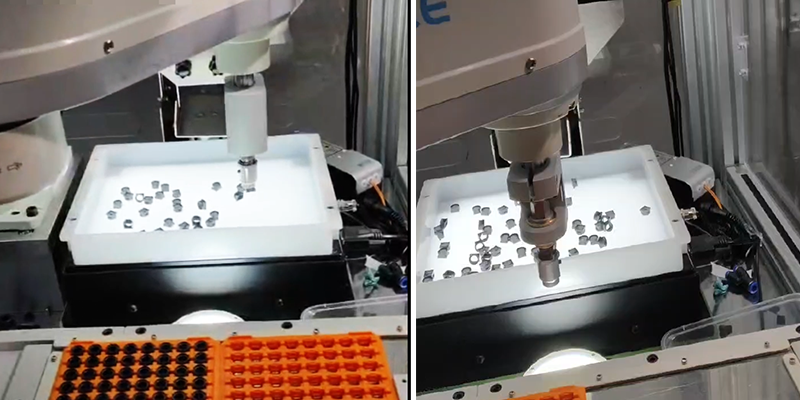
A complete flexible vibratory feeder vision system usually consists of the following hardware layers: vibration drive layer (excitation controller + vibration platform), imaging layer (industrial camera + strobe light source + lens/diffuser plate), processing layer (CkVision image processor) and execution layer (six‑axis collaborative robot or SCARA robot + end effector). CkVision image processor is located between the imaging layer and the execution layer, serving as the data convergence and decision node of the entire system.
For physical connection, the camera is connected to the processor via GigE or USB3, the strobe control signal is directly driven by the processor’s digital I/O, two‑way data exchange between the vibration controller and the processor is realized through EtherCAT real‑time bus (delay <1ms), and the robot receives picking coordinate instructions via TCP/IP or EtherCAT. The entire system performs timing synchronization through a unified time reference (IEEE 1588 PTP protocol), ensuring microsecond‑level alignment of all devices.
4.2 Software Interface and Data Flow
CkVision image processor provides an open API based on CkVisionSDK, allowing upper systems (MES, SCADA or robot teach pendant) to query real‑time detection results, modify vision parameters or trigger model switching via standard Ethernet. For changeover scenarios, operators only need to select the vision recipe corresponding to the part on the HMI interface, and the processor can complete model loading and parameter switching within 2–5 seconds. Cooperating with one‑click switching of excitation recipes of the vibration controller, the entire line achieves fast changeover in less than 10 minutes.
The data flow closed loop is as follows: image acquisition → preprocessing (denoising, enhancement) → target detection and pose estimation → multi‑target tracking → priority sorting → coordinate output (robot) + correction instruction (vibration controller) → next frame acquisition trigger. The entire loop can be completed within 20–40ms under optimal conditions, supporting high‑speed beats of 60–120 picks per minute.
5. Typical Application Case Analysis
5.1 Case 1: Automatic Screw Feeding System for 3C Electronics
A consumer electronics ODM manufacturer deployed a flexible vibratory feeder‑based screw feeding system on smartphone assembly lines, which needs to support mixed‑line feeding of 8 screw specifications from M1.0 to M2.5 simultaneously. Previously, when using traditional vibratory feeders, changeover required replacing the entire bowl set, taking about 45 minutes, and bowl inventory for different specifications occupied a large amount of storage space.
After introducing CkVision image processor, the system trained independent deep learning recognition models for 8 screw types and managed them in the form of recipes in the processor. The vision system can distinguish different screw specifications with 99.7% accuracy under mixed material conditions, and judge their upright (head up) or inverted status. For screws with incorrect poses, the vibration controller receives correction instructions and flips them to the correct orientation through local excitation. Finally, the system reduced changeover time to 8 minutes, increased overall equipment effectiveness (OEE) by about 18%, and reduced screw missing/misplacement defects to below 5 parts per million.
5.2 Case 2: Mixed Material Sorting of Automotive Fasteners
A tier‑1 automotive supplier faced flexible feeding demand for multi‑variety, small‑batch fasteners (32 types in total: bolts, nuts, washers, circlips) in an engine assembly workshop. The materials include galvanized steel, stainless steel and engineering plastics, with significant differences in reflective characteristics, bringing great difficulties to traditional optical solutions.
The engineering team customized a coaxial light + ring diffuse light dual‑light source solution for the project, cooperating with the adaptive lighting selection function of CkVision image processor: the system automatically performs one adaptive lighting calibration when each batch of new materials is launched, evaluates image quality scores under different light source combinations, selects the optimal light source configuration and stores it in the corresponding recipe. This mechanism fully automates manual light adjustment between different materials, shortening the commissioning cycle from about 2 hours per new material to less than 15 minutes. After system deployment, the overall recognition accuracy of 32 fasteners reaches 99.4%, with more than 3600 picks per hour, meeting the beat requirements of engine assembly lines.

5.3 Case 3: Precision Feeding of Medical Consumables
The medical device industry has much higher requirements for cleanliness and precision in part feeding than general industrial scenarios. A syringe component manufacturer needs to supply transparent plastic sealing gaskets with a diameter of 3mm to assembly robots in a specific orientation (convex surface up). The material is transparent TPE, which is almost indistinguishable from the background under ordinary white light.
The solution adopts CkVision image processor with a deep red backlight panel (660nm wavelength) for backlight imaging, forming high‑contrast contour images using the refractive index difference between parts and the background, and then distinguishing two orientations with or without convex platforms through precise circular contour fitting algorithms. Finally, the system runs stably in a Class 100,000 clean room, with single orientation judgment accuracy of ±2°, zero defective products (wrong orientation parts) outflow, meeting the data traceability requirements of FDA 21 CFR Part 11.
6. Quantitative Benefit Comparison
Based on data from multiple implemented projects, the deep integration solution of flexible vibratory feeder and CkVision vision shows significant advantages over traditional rigid vibratory feeder solutions in the following key indicators:
| Comparison Indicator | Traditional Rigid Vibratory Feeder | Flexible Feeder + CkVision |
|---|---|---|
| Changeover Time | 30–90 minutes | 5–10 minutes (over 80% reduction) |
| Compatible Material Types | Single fixed (one bowl one material) | More than 50 types (software recipe switching) |
| Feeding Positioning Accuracy | ±0.5–1.0mm (mechanical constraint) | ±0.05–0.15mm (visual guidance) |
| Orientation Recognition Accuracy | About 95% (mechanical filtering) | 99.4–99.7% (AI recognition) |
| Changeover Labor Cost | Requires professional commissioning engineers | One‑click switching by operators |
| OEE Improvement | Benchmark | 15–25% increase |
| Equipment Footprint | Multiple sets of bowl storage space | About 60% storage space saved |
| New Product Introduction Cycle | 4–8 weeks (custom bowl) | 3–5 days (vision model training) |
7. Key Project Implementation Points and Common Misunderstandings
7.1 Lighting Design Is the Key to Success
In flexible vibratory feeder vision systems, the importance of lighting design is often underestimated. A correct lighting scheme should form sufficient grayscale contrast between part contours, key features and the background, while suppressing saturated light spots caused by specular reflection. The recommended selection process in engineering practice is: first determine the key recognition features of parts (contour shape, surface protrusions, color marks, etc.), then select the light source type (backlight / coaxial / ring diffuse / strip side light) according to the feature type, and finally verify the robustness under different batches of materials and ambient light conditions through experiments.
7.2 Sample Data Quality Determines the Model Upper Limit
In the deep learning model training stage, the root cause of many project failures is insufficient coverage of training data. An ideal training set should include: samples under various lighting conditions, appearance differences of new and old batches of materials, slightly worn or stained samples that may appear during production, and negative samples (similar but non‑target parts). It is recommended to collect at least 500 labeled images for each material type, and continuously collect online data for incremental model updates in the first two weeks after production.
7.3 Collaborative Debugging of Vibration and Vision Parameters
The excitation parameters (frequency, amplitude, phase) of flexible vibratory feeders are strongly coupled with the exposure parameters (exposure time, strobe trigger phase) of the vision system. Wrong parameter combinations will cause image blur or part movement speed exceeding the processing capacity of the tracking algorithm. The recommended debugging sequence is: first fix vibration parameters to adjust vision for clear imaging, then optimize vibration strategy under fixed vision parameters to improve part flipping efficiency, and finally perform joint iterative optimization.
7.4 System Maintenance and Continuous Optimization Mechanism
A regular maintenance system needs to be established after the system is launched: clean camera lenses and diffuser plates monthly, check strobe light brightness attenuation (general lifespan 50,000–100,000 hours), and re‑evaluate the recognition accuracy of the model on the latest batches of materials quarterly. It is recommended to enable automatic archiving of low‑confidence samples in the data recording function of CkVision image processor, automatically save images with recognition confidence below the threshold as candidate samples for the next round of model updates, forming a benign closed loop of system self‑evolution.
8. Future Development Trend Forecast
Looking ahead, the integration of flexible vibratory feeders and image processors will deepen along three main paths.
First, the introduction of 3D vision. Current mainstream solutions are still based on 2D planar vision, but with the continuous cost reduction of structured light and time‑of‑flight (ToF) cameras, 3D vision will gradually enter flexible vibratory feeder systems, enabling the system to handle 3D poses of irregular curved parts (such as rubber seals, flexible cables) and achieve more complex picking guidance.
Second, reinforcement learning‑driven adaptive vibration strategies. Current vibration control strategies are mostly pre‑designed fixed programs. In the future, reinforcement learning algorithms will be introduced, allowing the system to independently explore and optimize excitation parameter combinations based on the part motion status fed back by vision, achieving fast self‑learning for new material types and further compressing the new product introduction cycle.
Third, cloud collaboration and knowledge sharing. With the help of industrial internet platforms, vision models and vibration recipes of multiple production lines within the same enterprise can be centrally managed and shared. When introducing new production lines, similar recipes in the existing knowledge base can be directly used as a starting point, combined with a small amount of local calibration data for rapid migration, greatly reducing the commissioning cost and time investment of each new production line.
9. Conclusion
Flexible vibratory feeders represent a fundamental transformation of workpiece feeding technology from mechanical constraints to visual perception, while CkVision image processors have become the core enabling technology for this transformation with their high‑performance hardware architecture, complete vision algorithm system and open integration interfaces. The deep collaboration between the two is not just a simple combination at the hardware level, but the construction of a complete “perception‑decision‑control” closed‑loop intelligent system.
Practical application data in various industries—from 3C electronics to automotive manufacturing, from medical consumables to daily chemical packaging—has proven that this combined solution can bring quantifiable and significant improvements in multiple dimensions such as changeover efficiency, recognition accuracy, production line flexibility and quality control. With the continuous evolution of 3D vision, reinforcement learning and industrial internet technologies, the collaborative capability of flexible vibratory feeders and intelligent image processors will further break through existing boundaries and release the core value of smart manufacturing in a wider range of application scenarios.
For manufacturing enterprises planning flexible production line upgrades, now is the best time to evaluate and introduce this advanced solution—technology is mature, cases are verified, and the ecosystem is complete.